Media Summary: rtabmap_ros rotational rgbd odometry error RTAB-Map ROS stereo outdoor mapping problem Rtabmap test rotation and traslation - two Cameras Robots Odometry
Rtabmap Ros Rotational Rgbd Odometry Error - Detailed Analysis & Overview
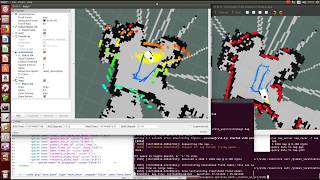
rtabmap_ros rotational rgbd odometry error RTAB-Map ROS stereo outdoor mapping problem Rtabmap test rotation and traslation - two Cameras Robots Odometry Ardumower (indoor), high odometry error, ROS amcl (left), hector mapping (right) This is my test run following the instructions given on 測試設定1.使用感測器RealSense D435 and 2D lidar 2.
Testing visual odometry with OrSens 3D-camera, ROS and RTAB-Map RTAB-map icp-odometry based mapping (with vicon ground truth)









![[ROS tutorial] RTAB-Map in ROS 101](https://i.ytimg.com/vi/gJz-MWn7jhE/mqdefault.jpg)

