Media Summary: We introduce a new, general motion primitive called Iterative Grasp and Pull (IGP), similar to pick and place in This paper introduces DextAIRity, an approach to Dmitry Berenson Assistant Professor Electrical Engineering & Computer Science Department, University of Michigan Friday, ...
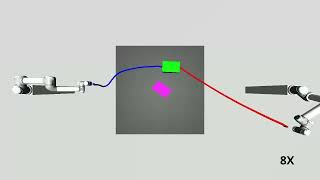
Deri Bot Learning To Collaboratively Manipulate Rigid Objects Via Deformable Objects - Detailed Analysis & Overview
We introduce a new, general motion primitive called Iterative Grasp and Pull (IGP), similar to pick and place in This paper introduces DextAIRity, an approach to Dmitry Berenson Assistant Professor Electrical Engineering & Computer Science Department, University of Michigan Friday, ... A presentation by Prof. Dmitry Berenson from University of Michigan. Recorded for the Second Workshop on Robotic Paper title: A Lyapunov-Stable Adaptive Method to Approximate Sensorimotor Models for Sensor-Based Control. Video accompanying the paper "Bandit-Based Model Selection for
Video accompanying the paper "Interleaving Planning and Control for For more details, please check the paper and our source code: Hybrid pad with foam and swivel joint ...