Media Summary: The following video proposes a computationally-efficient, accurate The RVL has constructed a novel robotic sensing platform to perform stereoscopic depth imaging and The presentations from the ArduPilot 2020 unConference All talks were virtual due to the worldwide health restrictions.
Visual Odometry Problem 2 - Detailed Analysis & Overview
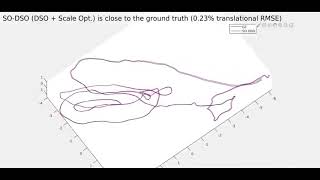
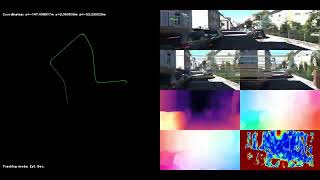
The following video proposes a computationally-efficient, accurate The RVL has constructed a novel robotic sensing platform to perform stereoscopic depth imaging and The presentations from the ArduPilot 2020 unConference All talks were virtual due to the worldwide health restrictions. Multiple DSO+ Scale Optimization Demos [Mo et al., IROS 2019]. Inside my school and program, I teach you my system to become an AI engineer or freelancer. Life-time access, personal help by ... In this work, Nazrul investigated the integration of both learning-based and classical approaches in monocular
At the August 2010 meeting of the Robotics Society of Southern California (RSSC), Rainer talks about This video talks about the conceptual differences between This version uses triangulated feature points and a pnp algorithm to estimate the camera pose. New 3D points are computed as ...