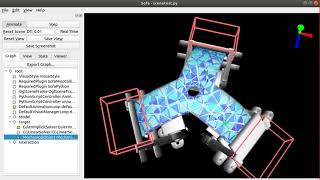
Media Summary: Authors: Cosimo Della Santina, and Daniela Rus Title: Supplementary video for the paper titled " Simulation of Soft Robot Gripper Control with SOFA using Soft Robotics Toolkit
Training A Neural Network For Soft Robots Control Using The Sofa Simulator - Detailed Analysis & Overview
Authors: Cosimo Della Santina, and Daniela Rus Title: Supplementary video for the paper titled " Simulation of Soft Robot Gripper Control with SOFA using Soft Robotics Toolkit Data-driven approaches have shown promising results in modeling and robotic setup for neural network training