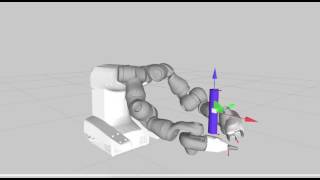
Media Summary: TUM Praktikum - Bau eines modularen Roboters (IN0012,IN2106, IN4231) Richard Cockburn Maclaurin Professor of Aeronautics and Astronautics Read full story here: Video of the Test n.2 presented in the paper "Multiple
Self Collision Avoidance Using Task Transition Algorithm - Detailed Analysis & Overview
TUM Praktikum - Bau eines modularen Roboters (IN0012,IN2106, IN4231) Richard Cockburn Maclaurin Professor of Aeronautics and Astronautics Read full story here: Video of the Test n.2 presented in the paper "Multiple Video of our agricultural multipurpose manipulator (developed within the EU-project CROPS) showing its model for In this work, we propose a data-driven approach for real-time Real-Time Self-Collision Avoidance in Joint Space for Humanoid Robots
PRISMA Lab research video experiments - Reactive Part of setting up a cobot is telling it about the world in which it works. And part of that world includes things to avoid, like parts of ... 12-DoF robot arm, in simulation under Actin control, showing