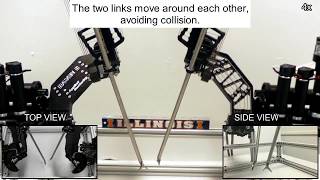
Media Summary: In our video a simulation result as well as real-world experiments show the 9-DOF multipurpose TUM Praktikum - Bau eines modularen Roboters (IN0012,IN2106, IN4231) Real-Time Self-Collision Avoidance in Joint Space for Humanoid Robots
Crops Manipulator Generation 1 Self Collision Avoidance - Detailed Analysis & Overview
In our video a simulation result as well as real-world experiments show the 9-DOF multipurpose TUM Praktikum - Bau eines modularen Roboters (IN0012,IN2106, IN4231) Real-Time Self-Collision Avoidance in Joint Space for Humanoid Robots Predictive Online Inverse Kinematics Algorithm for Redundant 12-DoF robot arm, in simulation under Actin control, showing This movie shows how Energid's Actin software can be used for complex, real-time path planning--allowing robots to avoid ...
ICRA 2020: Collision Avoidance with Proximity Servoing for Redundant Serial Robot Manipulators