Media Summary: Mobile robot Collision Avoidance Learning TEST Carlo Tiseo, Vladimir Ivan, Wolfgang Xaver Merkt, Ioannis Havoutis, Michael Mistry and Sethu Vijayakumar, A Passive Navigation ... To navigation on the complex environment, the Deep Reinforcement Learning can be attractive
Potential Filed For Collision Avoidance For Mobile Robots Using Second Order Newton Method - Detailed Analysis & Overview
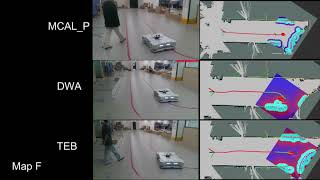
Mobile robot Collision Avoidance Learning TEST Carlo Tiseo, Vladimir Ivan, Wolfgang Xaver Merkt, Ioannis Havoutis, Michael Mistry and Sethu Vijayakumar, A Passive Navigation ... To navigation on the complex environment, the Deep Reinforcement Learning can be attractive From Simulation to Intelligent Motion Planning! In this project, I extended my 6-DOF See what's new in the latest release of MATLAB and Simulink: Download a trial: