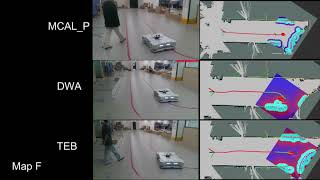
Media Summary: To navigation on the complex environment, the Deep Reinforcement This video is a demonstration of the Potential fields method for Mobile robot Collision Avoidance Learning TEST
Drl Based Collision Avoidance Mobile Robot Collision Avoidance Learning - Detailed Analysis & Overview
To navigation on the complex environment, the Deep Reinforcement This video is a demonstration of the Potential fields method for Mobile robot Collision Avoidance Learning TEST More information available at: www.ros.org/wiki/multi_robot_collision_avoidance. Reach Control improves the effectiveness, accuracy and control of Reach System manipulators. It packages an intuitive HMI with ... Experiment scenario 3: The multisensor EKF and the NMPC controller were then activated together. Starting from $(0,0,0)$, the ...
Utilizing neural networks and reinforcement This movie shows how Energid's Actin software can be used for complex, real-time path planning--allowing robots to avoid ...