Media Summary: MEAM620 - quadrotor avoid obstacles simulation - map1 MEAM620: Quadcopter - Trajectory Generator Simulation MEAM620 - quadrotor avoid obstacles simulation - map 3
Meam620 Simulated Quadrotor Path 1 - Detailed Analysis & Overview
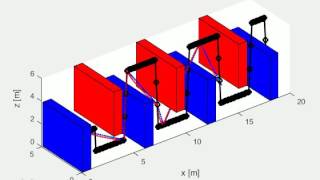
MEAM620 - quadrotor avoid obstacles simulation - map1 MEAM620: Quadcopter - Trajectory Generator Simulation MEAM620 - quadrotor avoid obstacles simulation - map 3 We generate piecewise quintic trajectories, and control the quad using our own nonlinear controller.