Media Summary: This video is part of our work on "Autonomous Teamed Exploration of Subterranean Environments using Legged and Aerial ... This video presents indicative results of a sequence of field experiments conducted to verify and evaluate new algorithms and ... Autonomous robot navigation can be particularly demanding, especially when the surrounding environment is not known and ...
Kostas Alexis Knowledge In A Nanosecond - Detailed Analysis & Overview
This video is part of our work on "Autonomous Teamed Exploration of Subterranean Environments using Legged and Aerial ... This video presents indicative results of a sequence of field experiments conducted to verify and evaluate new algorithms and ... Autonomous robot navigation can be particularly demanding, especially when the surrounding environment is not known and ... Find out how Professor Lamberg's work with school districts across Nevada help kids become better at math and improve their ... This paper addresses the challenge of active perception within autonomous navigation in complex, unknown environments. Join us for a full-day IEEE ICRA 2019 workshop on the "The Future of Aerial Robotics: Challenges and Opportunities". Details at: ...
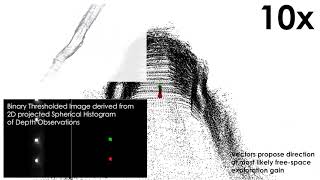
In this work, we present an approach for the detection of the direction of free space in order to improve the efficiency of robotic ... This work contributes a novel deep navigation policy that enables collision-free flight of aerial robots based on a modular ... ICRA 2022 Talk on our paper: Mihir Kulkarni, Mihir Rahul Dharmadhikari, Marco Tranzatto, Samuel Zimmermann, Victor Reijgwart ... This work contributes a novel strategy towards risk-aware motion planning for collision-tolerant aerial robots subject to localization ... Paolo De Petris, Dinh Huan Nguyen, Mihir Kulkarni, Frank Mascarich,