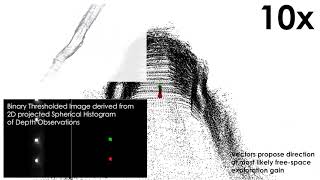
Media Summary: Abstract: This paper presents the design concept, modeling and motion planning solution for the This video presents preliminary results on In this work, we present an approach for the detection of the direction of free space in order to improve the efficiency of robotic ...
Kostas Alexis Computational Aerial - Detailed Analysis & Overview
Abstract: This paper presents the design concept, modeling and motion planning solution for the This video presents preliminary results on In this work, we present an approach for the detection of the direction of free space in order to improve the efficiency of robotic ... This work presents a novel path planning strategy for fast and agile exploration using Date & time: Monday 25 January @ 1pm-2pm Speaker: Prof. In this work we present a methodology for augmented reality-enhanced structural inspection using
This video presents results on contact-based inspection. Both a path-planning as well as control framework are proposed and ... Join us for a full-day IEEE ICRA 2019 workshop on the "The Future of