Media Summary: IEEE Robotics and Automation Letters (RA-L) 2024 Abstract: Spotlight talk at 4th Workshop on Representing and Authors: Dezhong Tong, Andrew Choi, Longhui Qin, Weicheng Huang, Jungseock Joo, M. Khalid Jawed ...
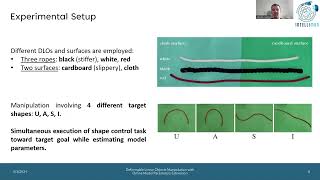
Deformable Linear Objects Manipulation With Online Model Parameters Estimation - Detailed Analysis & Overview
IEEE Robotics and Automation Letters (RA-L) 2024 Abstract: Spotlight talk at 4th Workshop on Representing and Authors: Dezhong Tong, Andrew Choi, Longhui Qin, Weicheng Huang, Jungseock Joo, M. Khalid Jawed ... Nahum Alvarez, Kimitoshi Yamazaki: “An Interactive Simulator for This video accompanies the research article “Planning and Control for Learning to Manipulate Deformable Objects without Demonstrations
Gerardo describes his work on the CLoPeMa FP7 European project which aimed to advance start-of-the-art in autonomous ... This paper proposes the universally applicable moving primitive called Iterative Grasp-Pull (IGP). It also introduces a novel ... Realtime Robust Shape Estimation of Deformable Linear Object (ICRA2024) Supplementary video for our paper "A Framework for Optimal model-based path planning for the robotic manipulation of deformable linear objects