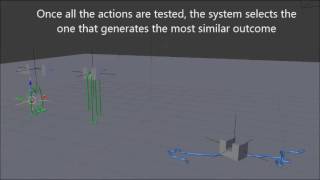
Media Summary: Authors: Dezhong Tong, Andrew Choi, Longhui Qin, Weicheng Huang, Jungseock Joo, M. Khalid Jawed ... This video accompanies the research article “ This paper proposes the universally applicable moving primitive called Iterative Grasp-Pull (IGP). It also introduces a novel ...
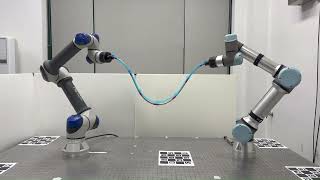
An Interactive Simulator For Deformable Linear Objects Manipulation Planning - Detailed Analysis & Overview
Authors: Dezhong Tong, Andrew Choi, Longhui Qin, Weicheng Huang, Jungseock Joo, M. Khalid Jawed ... This video accompanies the research article “ This paper proposes the universally applicable moving primitive called Iterative Grasp-Pull (IGP). It also introduces a novel ... This paper introduces DextAIRity, an approach to Optimal model-based path planning for the robotic manipulation of deformable linear objects Time-series Data-driven Three Dimensional Shape Control of
DynDLO: Learning-Based Trajectory Planning for Dynamic Manipulation of Deformable Linear Objects Authors: Jan Matas, Stephen James and Andrew Davidson, Department of Computing, Imperial College London Contact: ... Contributed paper: "Shape control of elastoplastic Gerardo describes his work on the CLoPeMa FP7 European project which aimed to advance start-of-the-art in autonomous ... Presentation by Yuxuan at ICRA 2021. This video overviews our approach to modeling the dynamics of one dimensional ...