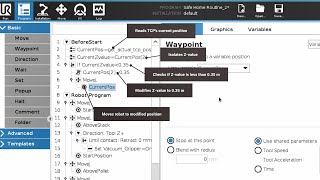
Media Summary: Okay therefore Britain's run program program In this video, Michael Davis will take you step-by-step through the process of updating the software on any type CB2 or CB3 model ... Learn about movements using variable waypoints -
Universal Robots Ursim Tutorial6 Movec - Detailed Analysis & Overview
Okay therefore Britain's run program program In this video, Michael Davis will take you step-by-step through the process of updating the software on any type CB2 or CB3 model ... Learn about movements using variable waypoints - In this video, we showcase the control and simulation of the Create subprogram/SubRoutine Open Gripper and Close Gripper