Media Summary: The objective of this project is to lay the foundations for Shows the result of filter applied to point cloud library produced by kinect. Uses nodelets from ROS perception_pcl package. Second try on the set of parameters for the
Uc3m Objects And Planes Segmentation Using Pcl - Detailed Analysis & Overview
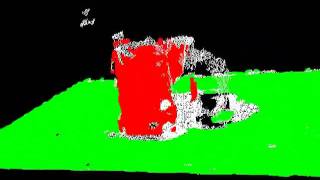
The objective of this project is to lay the foundations for Shows the result of filter applied to point cloud library produced by kinect. Uses nodelets from ROS perception_pcl package. Second try on the set of parameters for the


![[Point Cloud Processing] Plane Segmentation using PCL](https://i.ytimg.com/vi/6FuMTkqUERk/mqdefault.jpg)

![[Point Cloud Processing] Plane Segmentation using PCL (RoK-3 standing)](https://i.ytimg.com/vi/FmqB5FgAaz4/mqdefault.jpg)
![[Point Cloud Processing] Plane Segmentation using PCL (RoK-3 WalkingReady)](https://i.ytimg.com/vi/aPVCSIewY7g/mqdefault.jpg)