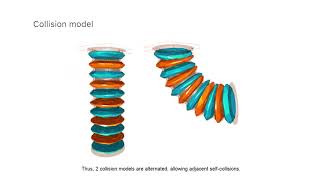
Media Summary: In this example, we modify the default SOFA scene caduceus This movie shows how Energid's Actin software can be used for complex, Real-Time Self-Collision Avoidance in Joint Space for Humanoid Robots
Soft Robot Self Collision Simulation In Real Time Using Model Order Reduction - Detailed Analysis & Overview
In this example, we modify the default SOFA scene caduceus This movie shows how Energid's Actin software can be used for complex, Real-Time Self-Collision Avoidance in Joint Space for Humanoid Robots Authors: Cosimo Della Santina, and Daniela Rus Title: Control oriented Kinematic Modeling and Observer Based Control of Soft Robot using Real Time Finite Element Method