Media Summary: D. Bruder, B. Gillespie, C. D. Remy, and R. Vasudevan, “ This is the accompanying video for our paper entitled " This is the accompanying video for our paper entitled "Data-driven
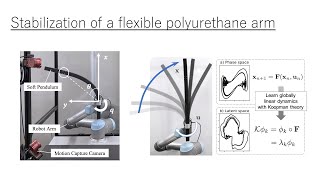
Soft Robot Modeling And Control Using Koopman Operator Theory - Detailed Analysis & Overview
D. Bruder, B. Gillespie, C. D. Remy, and R. Vasudevan, “ This is the accompanying video for our paper entitled " This is the accompanying video for our paper entitled "Data-driven Naoto Komeno*, Brendan Michael*, Katharina Küchler, Edgar Anarossi and Takamitsu Matsubara Nara Institute of Science and ... Abstract. Due to their inherent flexibility and versatility, This is the accompanying video for our submission to ICRA 2019. For more information, check out the preprint of our paper here: ...
Important references: [1] Williams et al. "A Data–Driven Approximation of the Supplementary video for our 2022 IEEE CASE paper "Online Daniel Bruder Assistant Professor, Mechanical Engineering University of Michigan Abstract: