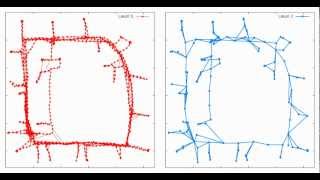
Media Summary: Used as the base-line in: Henrik Kretzschmar and Cyrill Stachniss Information-Theoretic Compression of Pose Henrik Kretzschmar and Cyrill Stachniss Information-Theoretic Compression of Pose ICRA 2018 Spotlight Video Interactive Session Wed AM Pod U.4 Authors: Schlegel, Dominik; Colosi, Mirco; Grisetti, Giorgio Title: ...
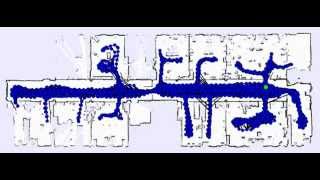
Slam Graph Based Slam Freiburg79 2011 - Detailed Analysis & Overview
Used as the base-line in: Henrik Kretzschmar and Cyrill Stachniss Information-Theoretic Compression of Pose Henrik Kretzschmar and Cyrill Stachniss Information-Theoretic Compression of Pose ICRA 2018 Spotlight Video Interactive Session Wed AM Pod U.4 Authors: Schlegel, Dominik; Colosi, Mirco; Grisetti, Giorgio Title: ... This video is part of an online course, Intro to Artificial Intelligence. Check out the course here: ... Giorgio Grisetti, Rainer Kümmerle, Cyrill Stachniss, Udo Frese, and Christoph Hertzberg Hierarchical Optimization on Manifolds ... Giorgio Grisetti, Rainer Kuemmerle, Cyrill Stachniss, and Wolfram Burgard A Tutorial on
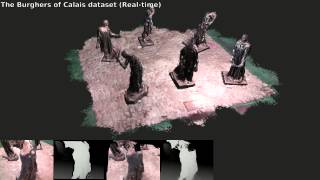
This video provides some intuition around Pose Video showing extra datasets and capabilities of ElasticFusion ElasticFusion: Dense This is a short video lecture by Wolfram, Giorgio, and Cyrill explaining