Media Summary: See the other videos in this series: This video ... This video briefly explains and demonstrates Path Planning in unknown environment. As agent receives more information about environment, and detects obstacles in path, ...
Ros Autonomous Robot Exploration Using Rapidly Randomized Tree Rrt - Detailed Analysis & Overview
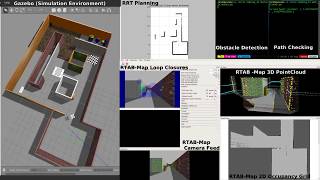
See the other videos in this series: This video ... This video briefly explains and demonstrates Path Planning in unknown environment. As agent receives more information about environment, and detects obstacles in path, ... In this class, you will learn how to apply Frontier Rapidly-exploring Random Trees (RRT) Motion Planning: ROS VDEngineering ~~My Udemy Courses on Motion Planning / Navigation / Trajectory Planning: ...






![ROS Developers LIVE-Class #65: [Robot Exploration] How Can a Robot Create a Map Autonomously](https://i.ytimg.com/vi/eQoXIiKIubo/mqdefault.jpg)




