Media Summary: Speaker: Gonzalo Ferrer - Skoltech The task of navigating, that is, moving from one place to another in any kind of We present a novel Deep Reinforcement Learning (DRL) based policy to compute FZI and IRT Jules Verne have developed together the Human Aware Mobile
Robot Navigation In Dynamic Environments - Detailed Analysis & Overview
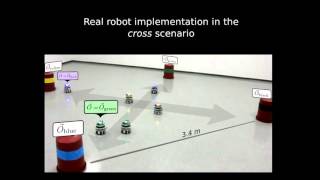
Speaker: Gonzalo Ferrer - Skoltech The task of navigating, that is, moving from one place to another in any kind of We present a novel Deep Reinforcement Learning (DRL) based policy to compute FZI and IRT Jules Verne have developed together the Human Aware Mobile Xuan Tung Truong and Trung Dung Ngo The More-Than-One Velocity-Scaled Safe Artificial Potential Field for Mobile Robot Navigation in Dynamic Environments Human-friendly robot navigation in dynamic environments
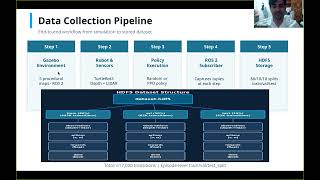
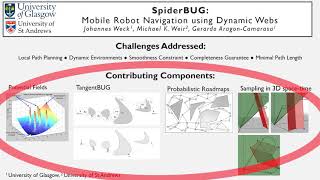
AI & Machine Learning Research Project - Dataset Analysis Presentation This video presents my preliminary dataset analysis for ... Video Author: Johannes Weck Video Submission for ICRA 2021. Abstract: The problem addressed in this paper is that of an ... Robot navigation using DOVTS space in dynamic environments






![THOUZER autonomous navigation in highly dynamic environment [E-SERIES Feature]](https://i.ytimg.com/vi/vzUtQyRuR2A/mqdefault.jpg)