Media Summary: Realtime Robust Shape Estimation of Deformable Linear Object (ICRA2024) Accepted for publication in the IEEE Robotics and Automation Letters (RA-L) IEEE Robotics and Automation Letters Presented at: The 2023 IEEE/RSJ International Conference on Intelligent Robots and ...
Realtime Robust Shape Estimation Of Deformable Linear Object - Detailed Analysis & Overview
Realtime Robust Shape Estimation of Deformable Linear Object (ICRA2024) Accepted for publication in the IEEE Robotics and Automation Letters (RA-L) IEEE Robotics and Automation Letters Presented at: The 2023 IEEE/RSJ International Conference on Intelligent Robots and ... Yi, Y; Youn, JH; Kim, JS; Kwon, DS; Kyung, KU; " serow: gem: 00:00:32 Outline 00:01:30 Introduction 00:05:28 ... Spotlight talk at 4th Workshop on Representing and Manipulating
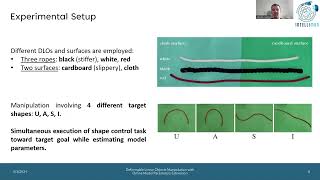
Paper accepted by IEEE Transactions on Robotics (T-RO). Project website: mingrui-yu.github.io/shape_control_DLO_2.