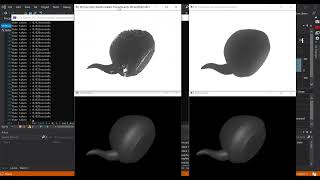
Media Summary: This is a testing video for my Final Year Project for Technical Engineering in Computer Systems at Universidad Rey Juan Carlos ... AINT308 module for Computer Science at Plymouth university. Small demonstration of the stereo vision on Jetson TX2 with
Real Time Disparity Map With Cuda - Detailed Analysis & Overview
This is a testing video for my Final Year Project for Technical Engineering in Computer Systems at Universidad Rey Juan Carlos ... AINT308 module for Computer Science at Plymouth university. Small demonstration of the stereo vision on Jetson TX2 with My personal project to attempt to create depth This is done on visual c++ using a opensource library called openVidia on my(Subhagato) laptop. This utilizes the full My video demonstrated 3D object depth reconstruction through left right eye stereo image pair, using Nvidia
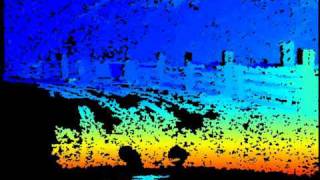
So, does Elon Musk is right that the future of self driving car is not on Lidar but on camera? I want to believe on it, camera is so ... Finding Disparity Map in Real-time with GPU (Stereo-Photogrammetry)