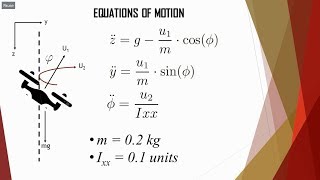
Media Summary: This work is based on the StarryPilot open-source project. For more information, please refer to ... Simulations of adaptive cascade control for a quadrotor transporting cable-suspended payload Corresponding to Case 2: Circle with Yaw = 0 Flight Experiment (the comparison experiment). The
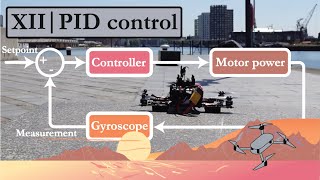
Quadrotor Under Cascade Pid Controllers - Detailed Analysis & Overview
This work is based on the StarryPilot open-source project. For more information, please refer to ... Simulations of adaptive cascade control for a quadrotor transporting cable-suspended payload Corresponding to Case 2: Circle with Yaw = 0 Flight Experiment (the comparison experiment). The Scenario 2 tests how the drone stabilizes its attitude, initial drone position is 30 deg roll. Drone stabilizes in 0.1 sec. Scenario 3 ... In this video, you will learn how you can stabilise your Buy me a Coffee: ⛔Learn More about this ...
1th IFAC Symposium on Intelligent Autonomous Vehicles, IAV 2022 Czech Republic, 7 July 2022 In this paper, we tackle the ...