Media Summary: This video demonstrates a deep reinforcement learning project. A 7-DOF Pybullet Kuka Robot Simulation using Inverse Kinematics The quadruped walking using bound mechanism to walk in
Pre Trained Kuka Robot In Pybullet Environment - Detailed Analysis & Overview
This video demonstrates a deep reinforcement learning project. A 7-DOF Pybullet Kuka Robot Simulation using Inverse Kinematics The quadruped walking using bound mechanism to walk in The quadruped walking using trot mechanism to walk in This implementation was widely inspired by this paper: and the While I am struggling with the drawings and printing of the new
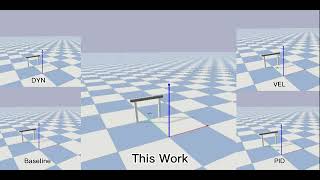
Fly through A Gate: Reinforcement Learning in Gym-PyBullet-Drones Environment reinforcementlearning Gymnasium Custom Env example: