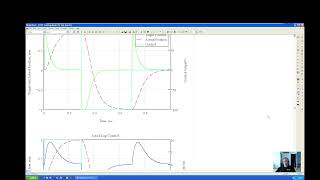
Media Summary: The inner loop pole locations and gains are calculated first so the inner loop pole locations are determined by the user. The outer ... The purpose of this video is to inform the viewer about what to expect. My videos go much deeper than the typical videos. Chances are you've interacted with something that uses a form of this
Peter Ponders Pid Cascade Control Part1 - Detailed Analysis & Overview
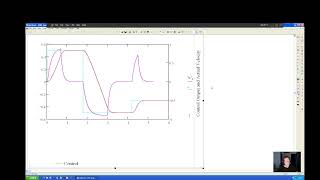
The inner loop pole locations and gains are calculated first so the inner loop pole locations are determined by the user. The outer ... The purpose of this video is to inform the viewer about what to expect. My videos go much deeper than the typical videos. Chances are you've interacted with something that uses a form of this The video shows the importance of using feed forwards to reduce error while following a motion profile. This video compares 3 methods for doing simulations. Laplace transforms, state space and differential equations are compared ... If you have ever tuned a hydraulic system and wondered why
This video shows how to use symbolic math for calculating