Media Summary: A Gazebo rotors simulation using 3 stereo camera pairs (30FPS) Trajectory length: 100m Relative end position Voice reveal whoo This system uses some basic trigonometry to track the robot's position relative to the field, meaning I can tell it ... Since early in robotics the performance of
Odometry Failure - Detailed Analysis & Overview
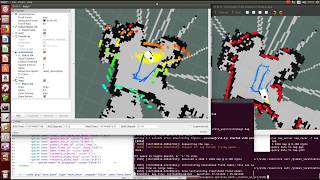
A Gazebo rotors simulation using 3 stereo camera pairs (30FPS) Trajectory length: 100m Relative end position Voice reveal whoo This system uses some basic trigonometry to track the robot's position relative to the field, meaning I can tell it ... Since early in robotics the performance of In this video we provide an overview of our recent paper: Under the Radar: Learning to Predict Robust Keypoints for Ardumower (indoor), high odometry error, ROS amcl (left), hector mapping (right) The odometry has not been calibrated yet, just measured. After this run, the remaining