Media Summary: Authors: M. A. Santos, A. Ferramosca, G. V. Raffo. This work presents an Economic MPC with Velocity Obstacle for Dynamic Obstacles ... project "Mobile robot motion planning and and control with
Obstacle Avoidance With Mpc Controller - Detailed Analysis & Overview
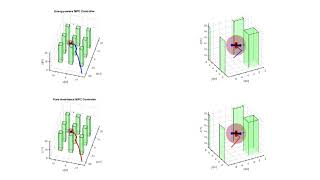
Authors: M. A. Santos, A. Ferramosca, G. V. Raffo. This work presents an Economic MPC with Velocity Obstacle for Dynamic Obstacles ... project "Mobile robot motion planning and and control with Paper: GitHub: This video overviews our ... At the Foot of the Sphinx by Twin Musicom is licensed under a Creative Commons Attribution license ... Two-level Model Predictive Control Obstacle Avoidance
Experiments on the X1 research vehicle to avoid a simulated car door that may open into its lane. Contingency IEEE LARS 2021 Abstract: This work proposes a single-layer nonlinear finite-horizon optimal ICUAS 2021 Abstract: This work proposes a single-layer finite-horizon optimal My final experiment for bachelor's thesis at Czech Technical University, Faculty of Electrical Engineering. My task was to create a ...