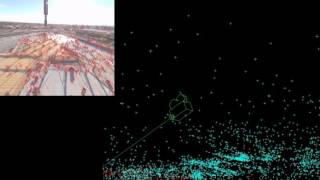
Media Summary: Monocular VO only. NO IMU data is used, video only. No post processing. No loop closure. Runs in "real-time" mode, image frame ... This video demonstrates how to use video data to measure the position of a Autonomous navigation test, t265 and custom
Nvvo Nvidia Visual Odometry Drone Construction Site - Detailed Analysis & Overview
Monocular VO only. NO IMU data is used, video only. No post processing. No loop closure. Runs in "real-time" mode, image frame ... This video demonstrates how to use video data to measure the position of a Autonomous navigation test, t265 and custom Visual Inertial Odometry (VIO) on NVIDIA Jetson Nano This visualisation provides insight into the Bogazici University, Department of Computer Engineering, BS Graduation
Monocular VO only. No post processing. Runs in real-time mode at 200+fps, image frame in, 6DOF for that frame out.