Media Summary: The video demonstrates one of the advanced techniques of This is the long version of our ICRA 2013 video submission for paper titled: 主讲人:Xudong Zhang 主讲人介绍:iMorpheus.ai 课程详情: SLAM(Simultaneous Localization and
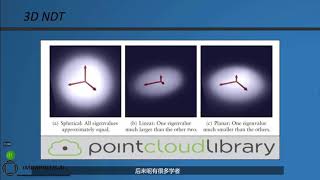
Normal Distributions Transform Ndt Mapping Autonomous Vehicles - Detailed Analysis & Overview
The video demonstrates one of the advanced techniques of This is the long version of our ICRA 2013 video submission for paper titled: 主讲人:Xudong Zhang 主讲人介绍:iMorpheus.ai 课程详情: SLAM(Simultaneous Localization and Scan Matching Localization with LIDAR Point Clouds - Algorithm 1: Industrial environments are rarely static and often their configuration is continuously changing due to the material transfer flow. This video shows how changes in a surrounding of an