Media Summary: Scientists in Polina Anikeeva's lab at MIT's McGovern Institute have developed tiny, A team of material scientists and electronic engineers at MIT, has developed a way to create magnetic The speaker is Michael Brockdorff from the University of Leeds.
Magnetically Actuated Fiber Based Soft Robots - Detailed Analysis & Overview
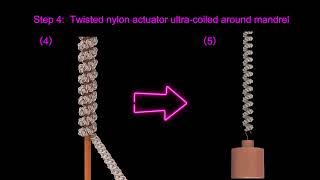
Scientists in Polina Anikeeva's lab at MIT's McGovern Institute have developed tiny, A team of material scientists and electronic engineers at MIT, has developed a way to create magnetic The speaker is Michael Brockdorff from the University of Leeds. A team of researchers at Johannes Kepler University in Austria, has developed a series of tiny, steerable electromechanical ... High-Performance Twisted Nylon Actuators for ICRA 2018 Spotlight Video Interactive Session Wed PM Pod D.8 Authors: Pozzi, Maria; Miguel, Eder; Deimel, Raphael; Malvezzi, ...
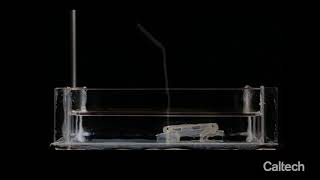
Researchers at Caltech and at Harvard have developed Magnetically Actuated Soft Crawler on Hands Researchers have developed a caterpillar inspired Evolutionary Algorithm-guided Voxel-Encoding Printing of Functional Hard-magnetic


![[EIS2022] Dual-Arm Platform for Control of Magnetically Actuated Soft Robots](https://i.ytimg.com/vi/sk7hjepTU90/mqdefault.jpg)