Media Summary: Final Research Challenge of Artificial Intelligence for Robotics: Online Giorgio Grisetti, Rainer Kümmerle, Cyrill Stachniss, Udo Frese, and Christoph Hertzberg Hierarchical Optimization on Manifolds ... Dynamic Pose Graph Slam on MIT CSAIL Reading Room Dataset
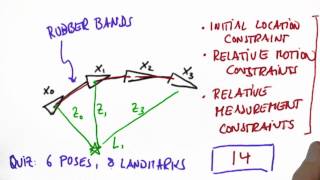
Live Coding Graph Slam In Python Part 2 - Detailed Analysis & Overview
Final Research Challenge of Artificial Intelligence for Robotics: Online Giorgio Grisetti, Rainer Kümmerle, Cyrill Stachniss, Udo Frese, and Christoph Hertzberg Hierarchical Optimization on Manifolds ... Dynamic Pose Graph Slam on MIT CSAIL Reading Room Dataset