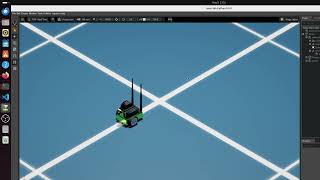
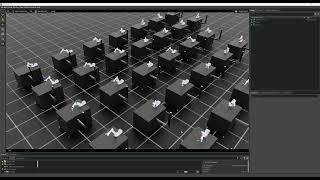
Media Summary: Isaac Lab Potential Field Obstacle Avoidance robotics It takes a significant amount of time and energy to create these free video ... In this tutorial I did several experiments to train a robot to avoid dynamically moving
Isaac Lab Potential Field Obstacle Avoidance - Detailed Analysis & Overview
Isaac Lab Potential Field Obstacle Avoidance robotics It takes a significant amount of time and energy to create these free video ... In this tutorial I did several experiments to train a robot to avoid dynamically moving Custom Humanoid Loco-Manipulation [Isaac Lab] Testing a reinforcement learning policy for static balance on the atom01 humanoid ... The robot now navigates autonomously through a sequence of waypoints using closed-loop control with real-time odometry ...
The following repos includes Flight Controller, Mechanics & Dynamics implementation for this work. TL;DR A companion clip to my rough-terrain locomotion project. The Unitree Go2 quadruped, trained in - start building autonomous robots, digital twins, and AI-powered systems with free, self-paced courses ... n this experiment, I deployed a trained policy from NVIDIA



![Custom Humanoid Loco-Manipulation [Isaac Lab]](https://i.ytimg.com/vi/4K3ckrIAfQM/mqdefault.jpg)
![[Isaac Lab] Atom01 Static Balance RL — Reward Function Only](https://i.ytimg.com/vi/VqLgRmfAaj4/mqdefault.jpg)