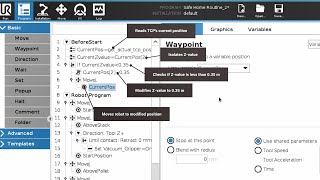
Media Summary: A waypoint can describe by a variable. Go to the Advanced Tab/Assignment to create a variable. A variable has to be a pose. Course: Technical and Bossiness Writing Project: Creation of How to align the active TCP to a feature To learn more about features, visit ...
How To Program A Counter On Universal Robots Simulator - Detailed Analysis & Overview
A waypoint can describe by a variable. Go to the Advanced Tab/Assignment to create a variable. A variable has to be a pose. Course: Technical and Bossiness Writing Project: Creation of How to align the active TCP to a feature To learn more about features, visit ... ... class of industrial robots produced by In this video, I will demonstrate how to monitor IO in a thread and then use that state to later have logic that can be consumed in ... In this video, UR's Eric Andersen shows us how to take advantage of the system's innate path planning capabilities and change ...