Media Summary: 'Doing the robot' on the dancefloor would look more like 'doing the worm' if the dance move was inspired by Evolution of the controller for a biped-shaped voxel-based soft robot Researchers at Caltech and at Harvard have developed
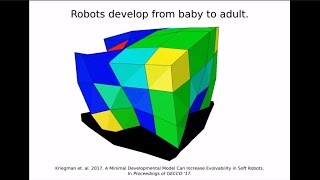
Evolving Soft Robots With Multiple Materials Muscle Bone Etc - Detailed Analysis & Overview
'Doing the robot' on the dancefloor would look more like 'doing the worm' if the dance move was inspired by Evolution of the controller for a biped-shaped voxel-based soft robot Researchers at Caltech and at Harvard have developed Brief description of professor Eric Medvet's research field. 2021 IEEE RAS Seasonal School on Rehabilitation and Assistive Technologies based on Check out the full paper ( ): Sam Kriegman, Nick Cheney, Francesco Corucci, and Josh C.
Video attachment to RoboSoft 2025 publication titled "Learning Low-Dimensional Strain Models of My Project on Evolving Soft Robots Morphology Using CPPN-NEAT