Media Summary: ICRA 2018 Spotlight Video Interactive Session Wed PM Pod R.6 Authors: Droeschel, David; Behnke, Sven Title: Video spotlight for paper: David Droeschel and Sven Behnke: " ICRA 2018 Spotlight Video Interactive Session Tue AM Pod U.8 Authors: Park, Chanoh; Moghadam, Peyman; Kim, Soohwan; ...
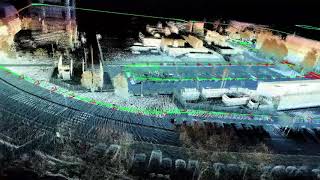
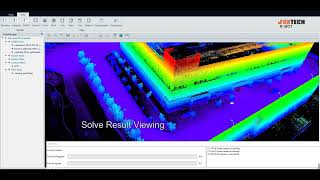
Efficient Continuous Time Slam For 3d Lidar Based Online Mapping - Detailed Analysis & Overview
ICRA 2018 Spotlight Video Interactive Session Wed PM Pod R.6 Authors: Droeschel, David; Behnke, Sven Title: Video spotlight for paper: David Droeschel and Sven Behnke: " ICRA 2018 Spotlight Video Interactive Session Tue AM Pod U.8 Authors: Park, Chanoh; Moghadam, Peyman; Kim, Soohwan; ... Watch how Novus AMRs make intelligent, real- A research project in progress in our lab. This project is going for development of real-