Media Summary: EE 175 - Stereo Camera Depth Estimation and Path-Planning Receives a stream of image pairs from two identical, calibrated Stereo Camera Autonomous Navigation: Obstacle Avoidance & Path-Planning
Ee 175 Stereo Camera Depth Estimation And Path Planning - Detailed Analysis & Overview
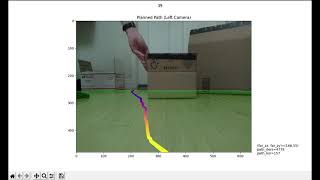
EE 175 - Stereo Camera Depth Estimation and Path-Planning Receives a stream of image pairs from two identical, calibrated Stereo Camera Autonomous Navigation: Obstacle Avoidance & Path-Planning Obstacle location estimation & Collision avoidance path planning using AI based stereo camera First Principles of Computer Vision is a lecture series presented by Shree Nayar who is faculty in the Computer Science ... This work has been done in the context of a project at the University of Karlsruhe. Two
Get FREE Robotics & AI Resources (Guide, Textbooks, Courses, Resume Template, Code & Discounts) – Sign up via the pop-up ...