Media Summary: Dynamic Obstacle Avoidance with Model Predictive Trajectory Generator Two-level Model Predictive Control Obstacle Avoidance MPC with Velocity Obstacle for Dynamic Obstacles
Dynamic Obstacle Avoidance With Model Predictive Trajectory Generator Mptg Erp42 - Detailed Analysis & Overview
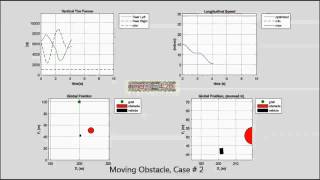
Dynamic Obstacle Avoidance with Model Predictive Trajectory Generator Two-level Model Predictive Control Obstacle Avoidance MPC with Velocity Obstacle for Dynamic Obstacles Autonomous Trajectory Tracking and Obstacle Avoidance via Model Predictive Control This work is the implementation of the paper, My final experiment for bachelor's thesis at Czech Technical University, Faculty of Electrical Engineering. My task was to create a ...
Authors: M. A. Santos, A. Ferramosca, G. V. Raffo. This work presents an Economic This is a simulation of an autonomous vehicle








![Model predictive control for obstacle avoidance for autonomous ground vehicles [1/2]](https://i.ytimg.com/vi/RcY41FFBqOc/mqdefault.jpg)