Media Summary: Proud of being one of the first humans to have the opportunity trying the This is the second prototype of the project RopeBot. The main control loop is implemented in C++ and runs on a Raspberry Pi 3B. cablewindingrobot This video shows how RecurDyn accurately verifies the
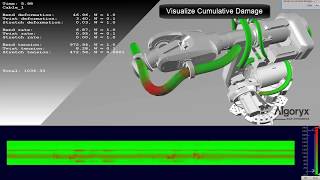
Dmworks 3 0 Robot Cable Simulation - Detailed Analysis & Overview
Proud of being one of the first humans to have the opportunity trying the This is the second prototype of the project RopeBot. The main control loop is implemented in C++ and runs on a Raspberry Pi 3B. cablewindingrobot This video shows how RecurDyn accurately verifies the Cable robot simulator unveiled in Germany