Media Summary: This is my work with my colleague on using neural networks to learn 1. CNN-based object detection 2. Object Localization 3. Minimum snap trajectory slalom with obstacles
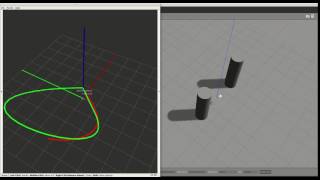
Crazyflies Minimum Snap Trajectory Circular Helix - Detailed Analysis & Overview
This is my work with my colleague on using neural networks to learn 1. CNN-based object detection 2. Object Localization 3. Minimum snap trajectory slalom with obstacles Quadrotor trajectory tracking and minimum snap trajectory generation A short selection of how researchers all over the world are using the This software-in-the-loop simulation was performed with the "ls2n_drones" ROS2/Gazebo package which was provided by the lab ...