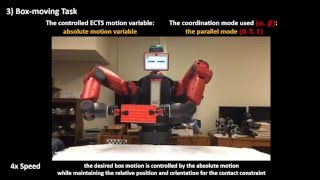
Media Summary: We motivate, visualize and demonstrate recent work for minimizing the total execution time of a This presentation explains the foundational concepts introduced on the first page of a research paper on Transportation is one of the most popular tasks robots perform in industrial scenarios. When the object to manipulate is particularly ...
Coordinated Motion Planning The Video - Detailed Analysis & Overview
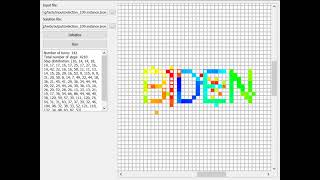
We motivate, visualize and demonstrate recent work for minimizing the total execution time of a This presentation explains the foundational concepts introduced on the first page of a research paper on Transportation is one of the most popular tasks robots perform in industrial scenarios. When the object to manipulate is particularly ... SIGGRAPH Asia 2022 Conference Paper by Yukun Lu, Ke Chen, Ligang Liu, and Peng Song. We combine the scalability of the MAPF algorithm LaCAM with kinodynamic Coordinated motion planning project - 109 robots