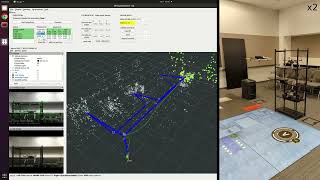
Media Summary: Localization, Mapping, Object detection and depth estimation This experiment presents a real-time distributed framework for Unmanned Aerial Vehicle ( Thermo-Fluids Control Laboratory - Texas A&M University This video shows 4 simulations of a
Autonomous Uav Navigation Using Orb Slam For Indoor Spaces - Detailed Analysis & Overview
Localization, Mapping, Object detection and depth estimation This experiment presents a real-time distributed framework for Unmanned Aerial Vehicle ( Thermo-Fluids Control Laboratory - Texas A&M University This video shows 4 simulations of a Paper submitted to 23rd IFAC Symposium on Automatic Control in Aerospace Abstract: This work proposes a multi-layer Model ...