Media Summary: In this video, we explain how to derive the adaptive extended kalman filter (EKF) with noisy ublox data In robotics, "localization" is a procedure by which a
Autonomous Navigation Using Extended Kalman Filter - Detailed Analysis & Overview
In this video, we explain how to derive the adaptive extended kalman filter (EKF) with noisy ublox data In robotics, "localization" is a procedure by which a Online demonstration of EKF estimation performance w.r.t several IMU/ In the video, the numbered circles represent landmarks 1 through 6. The circle colored in gray is the landmark currently being ... Watch the first video in this series here: This video presents a high-level understanding of the ...
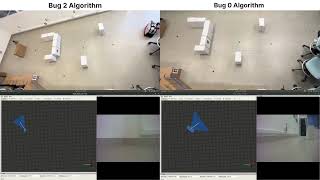
A MATLAB simulation to test an algorithm for