Media Summary: This experiment uses a distributed Nonlinear Model Predictive Formation Controller (NMPFC) to converge and maintain a ... This is a supplementary simulation video for the previously uploaded "Distributed cooperative control for Simulink Simulation of wheeled robot over obstacle
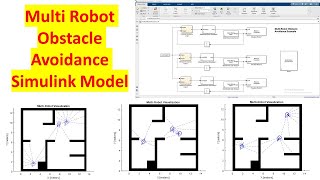
Multi Robot Obstacle Avoidance In Simulink - Detailed Analysis & Overview
This experiment uses a distributed Nonlinear Model Predictive Formation Controller (NMPFC) to converge and maintain a ... This is a supplementary simulation video for the previously uploaded "Distributed cooperative control for Simulink Simulation of wheeled robot over obstacle Obstacle Avoidance Using LEGO MINDSTORMS EV3 and Simulink Mobile Robot Simulation for Collision Avoidance with Simulink