Media Summary: ICRA 2018 Spotlight Video Interactive Session Wed AM Pod E.6 Authors: Rechy Romero, Adrian; Borges, Paulo Vinicius Koerich; ... Submission to ICRA 2018 by Adrian Rechy, Paulo V. K. Borges, Alberto Elfes and Andreas Pfrunder. Watch the first video in this series here: This video presents a high-level understanding of the ...
Map Aware Particle Filter For Localization - Detailed Analysis & Overview
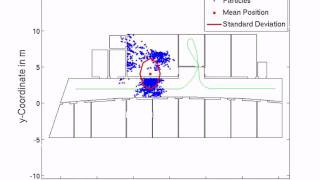
ICRA 2018 Spotlight Video Interactive Session Wed AM Pod E.6 Authors: Rechy Romero, Adrian; Borges, Paulo Vinicius Koerich; ... Submission to ICRA 2018 by Adrian Rechy, Paulo V. K. Borges, Alberto Elfes and Andreas Pfrunder. Watch the first video in this series here: This video presents a high-level understanding of the ... It is important for autonomously navigating robots to know their position and orientation while moving in their environment. This is the first video in a series of videos about robot Starting from a unknown position represented by the uniformly scattered
This video is recorded for presenting our paper accepted by the 2022 IEEE/RSJ International Conference on Intelligent Robots ...