Media Summary: Note: The derived SVD solution contains a small mistake. Either one has to swap the definition of a_n and b_n or one transposes ... You've scanned a room or object and now you have lots of discrete scans you want to fit together. Dr Mike Pound explains how ... IROS'2022 Talk by Louis Wiesmann about the RAL-IROS'2022 paper: L. Wiesmann, T. Guadagnino, I. Vizzo, G. Grisetti, J. Behley, ...
Icp Point Cloud Registration Part 2 Unknown Data Association Cyrill Stachniss 2021 - Detailed Analysis & Overview
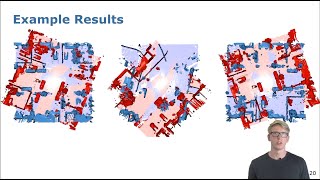
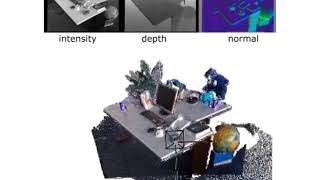
Note: The derived SVD solution contains a small mistake. Either one has to swap the definition of a_n and b_n or one transposes ... You've scanned a room or object and now you have lots of discrete scans you want to fit together. Dr Mike Pound explains how ... IROS'2022 Talk by Louis Wiesmann about the RAL-IROS'2022 paper: L. Wiesmann, T. Guadagnino, I. Vizzo, G. Grisetti, J. Behley, ... MPR: A General Framework for Flexible Multi-Cue Photometric