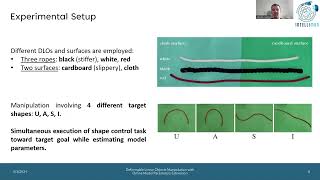
Media Summary: IEEE Robotics and Automation Letters (RA-L) 2024 Link paper: Link code: ... This video presents the results of our work titled "3-D shape control of IEEE Robotics and Automation Letters (RA-L) 2024 Abstract: Manipulating
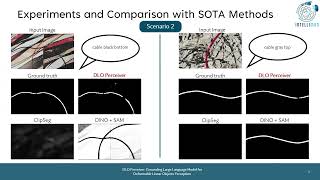
Dlo Perceiver Grounding Large Language Model For Deformable Linear Objects Perception - Detailed Analysis & Overview
IEEE Robotics and Automation Letters (RA-L) 2024 Link paper: Link code: ... This video presents the results of our work titled "3-D shape control of IEEE Robotics and Automation Letters (RA-L) 2024 Abstract: Manipulating Title: A Weakly Supervised Semi-Automatic Image Labeling Approach for Spotlight talk at 3nd Workshop on Representing and Manipulating Spotlight talk at 5th Workshop: Reflections on Representations and Manipulating
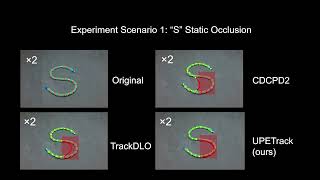
Spotlight talk at 4th Workshop on Representing and Manipulating This video accompanies our paper, "TrackDLO: Tracking