Media Summary: Note: this is a re-implementation of Jason Peng's Fly through A Gate: Reinforcement Learning in Gym-PyBullet-Drones Environment reinforcementlearning Gymnasium Custom Env example:
Deepmimic Backflip Policy Trained In Pybullet Gym Environment - Detailed Analysis & Overview
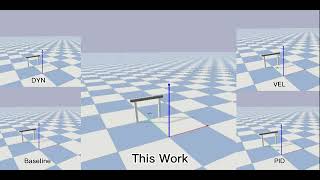
Note: this is a re-implementation of Jason Peng's Fly through A Gate: Reinforcement Learning in Gym-PyBullet-Drones Environment reinforcementlearning Gymnasium Custom Env example: IROS 2021 Video In this paper, we propose an open-source OpenAI Deep Deterministic Selective Memory (DDSM) AI algorithm learns how to walk in improved Team: Lokesh Krishna - Nishant Kumar ...