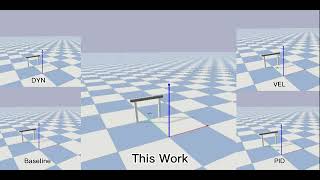
Media Summary: Agile flight of autonomous quadrotors in cluttered environment requires constrained Fly through A Gate: Reinforcement Learning in Gym-PyBullet-Drones Environment IROS 2021 Video In this paper, we propose an open-source OpenAI
Deep Se 3 Motion Planning Simulations In Gym Pybullet Drones - Detailed Analysis & Overview
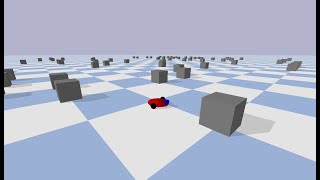
Agile flight of autonomous quadrotors in cluttered environment requires constrained Fly through A Gate: Reinforcement Learning in Gym-PyBullet-Drones Environment IROS 2021 Video In this paper, we propose an open-source OpenAI Learning to associate actions (discret right, left) with perception.